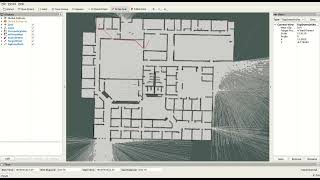
Media Summary: Earlier I showed basic robot movement, the back and forth loop and circle movement, now I've upgraded to Need to get to your goal quickly? Ensure you See the other videos in this series: This video ...
Ros2 Apf Path Planning - Detailed Analysis & Overview
Earlier I showed basic robot movement, the back and forth loop and circle movement, now I've upgraded to Need to get to your goal quickly? Ensure you See the other videos in this series: This video ... You can check the Lectures, Tutorials, and codes of the ROS in Autonomous Systems Applications course through the below ... Using the ROS move_base package ( which includes a global planner and local planner, we use ...