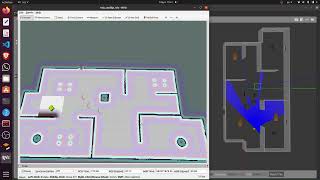
Media Summary: Experimenting with by segmenting the drivable surface and using its centroid's location as a goal for # Turtle Bot 3 navigation using custom settings for Wish to get into the shoes of a Robotics Software Engineer and see the complete cycle of mobile robot development. Also learn ...
Ros Move Base Ros Path - Detailed Analysis & Overview
Experimenting with by segmenting the drivable surface and using its centroid's location as a goal for # Turtle Bot 3 navigation using custom settings for Wish to get into the shoes of a Robotics Software Engineer and see the complete cycle of mobile robot development. Also learn ... This series of videos shows how to get the Welcome to our YouTube video about Autonomous Mobile Robots using








![[ROS] move_base without a map](https://i.ytimg.com/vi/XWwO8ACAg2g/mqdefault.jpg)