Media Summary: Robust Vehicle Localization using Entropy MIT - October 13, 2023 Speaker: Grace Gao Seminar title: ... Chi Yuan Goh, Serin Lee, Hyun Myung, "
Robust Vehicle Localization Using Entropy - Detailed Analysis & Overview
Robust Vehicle Localization using Entropy MIT - October 13, 2023 Speaker: Grace Gao Seminar title: ... Chi Yuan Goh, Serin Lee, Hyun Myung, " Elijah S. Lee, Ankit Vora, Armin Parchami, Punarjay Chakravarty, Gaurav Pandey, and Vijay Kumar, “Infrastructure Node-based ... Paper link: This paper addresses the problem of active collaborative ICRA 2018 Spotlight Video Interactive Session Wed PM Pod M.1 Authors: Wan, Guowei; Yang, Xiaolong; Cai, Renlan; Li, Hao; ...
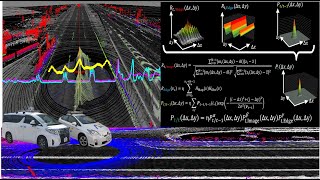
In this video, we show a unique holistic and feature based The work here describes the development of a planning algorithm intended to improve the Area 220, the Canvas, Inc. Innovation Lab, is managing a Phase I STTR to provide an