Media Summary: CVPR 2016 Paper Video Taiki SEKII ( ABSTRACT: This paper proposes a novel method for In this tutorial we're exploring a fully automated workflow for Robust Real-Time 3D Face Tracking under Extreme Pose, Depth, and Expression Variations
Robust Real Time 3d Tracking - Detailed Analysis & Overview
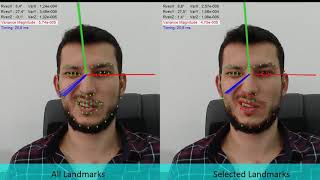
CVPR 2016 Paper Video Taiki SEKII ( ABSTRACT: This paper proposes a novel method for In this tutorial we're exploring a fully automated workflow for Robust Real-Time 3D Face Tracking under Extreme Pose, Depth, and Expression Variations In the past years, the number of applications for mobile robot systems within public areas have been increasing. Employing ... Abstract - Face pose estimation is an important computer vision problem that has many applications. Vehicle driver
![Robust 3D Tracking with Descriptor Fields [CVPR 2014]](https://i.ytimg.com/vi/yw5hoImVuf8/mqdefault.jpg)