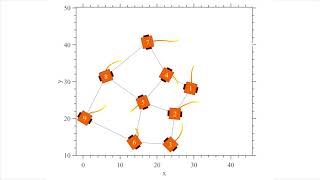
Media Summary: Exploiting the recently developed prescribed performance The GRITSbots form a rectangular shape using Prescribed Performance Distance Based Formation Control
Robust Distributed Planar Formation Control - Detailed Analysis & Overview
Exploiting the recently developed prescribed performance The GRITSbots form a rectangular shape using Prescribed Performance Distance Based Formation Control This video presents the simulation results associated with the paper **“Adjustable Stiffness The team is composed by 5 Khepera III mobile robots and a base station set-up by the robotic group of University of Cassino.