Media Summary: This video shows how using current 3D sensor data to guide a Master Thesis: Student: Nicola Covallero The In this demonstration, a user interacts with the system by teaching several objects to the
Robotics Task Clearing A Table - Detailed Analysis & Overview
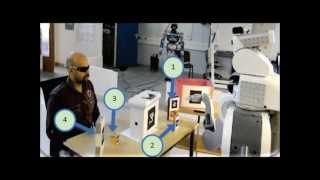
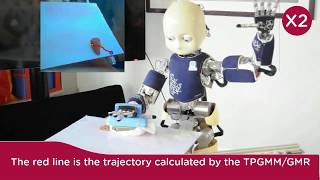
This video shows how using current 3D sensor data to guide a Master Thesis: Student: Nicola Covallero The In this demonstration, a user interacts with the system by teaching several objects to the Grasp Planning and Manipulation Planning. In this video Jido autonomously grasps 2 objects placed on the Project Website: The project report, videos and additional details are listed ... In this demonstration, the system works in a scenario where a
PR2 robot cooperatively cleaning the table based on Affordance and Effort analysis Authors: J. Kim, N. Cauli, P. Vicente, B. Damas, F. Cavallo, J. Santos-Victor 18th IEEE International Conference on ... To show the functionalities of the system, a JACO assistive