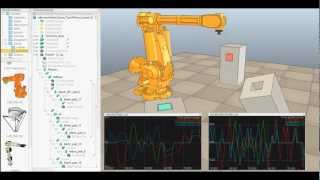
Media Summary: The video shows a simulation performed with the V-REP This scene demonstrates joints trajectory generation and execution by the V-REP - the Virtual Robot Experimentation Platform - is a 3D
Robotics Simulation Reflexxes Motion Library - Detailed Analysis & Overview
The video shows a simulation performed with the V-REP This scene demonstrates joints trajectory generation and execution by the V-REP - the Virtual Robot Experimentation Platform - is a 3D The video shows the Pioneer P3DX robot navigating with a Braitenberg algorithm in the V-REP In this video I explain how to generate trajectories using a polynomial (cubic) trajectory and also the RML library to move ...