Media Summary: Thanks to Jane Street for their support... Check out internships here: More links & stuff in full ... Need to get to your goal quickly? Ensure you plan the right path! Members of the Agility team talk about perception and how it enables Digit to work in real-world environments, as well as our ...
Robotic Algorithms - Detailed Analysis & Overview
Thanks to Jane Street for their support... Check out internships here: More links & stuff in full ... Need to get to your goal quickly? Ensure you plan the right path! Members of the Agility team talk about perception and how it enables Digit to work in real-world environments, as well as our ... Overview of RRT, RRT*, PRM Includes visuals created from our own implementations Final Project for MIT 6.881 By Violet Killy, ... See the other videos in this series: This video ... Reinforcement learning is a field of machine learning concerned with how an agent should most optimally take actions in an ...
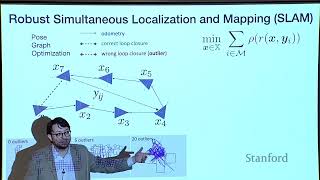
Get the map of control theory: Download eBook on the fundamentals of control ... December 8, 2023 Luca Carlone, MIT A large gap still separates So excited to be back to content creation! Code:




![Motion Planning Algorithms (RRT, RRT*, PRM) - [MIT 6.881 Final Project]](https://i.ytimg.com/vi/gP6MRe_IHFo/mqdefault.jpg)