Media Summary: 00:03 - Video Model 00:05 - Simple Model: Validation 01:13 - Simple Model: Test 01:51 - Simple Model: Extra 03:14 - Backbone ... Papers and source code are available at Visual imitation learning provides efficient and ... This work developed a Chinese character recombination technology based on DMP
Robot Task Primitive Segmentation Using - Detailed Analysis & Overview
00:03 - Video Model 00:05 - Simple Model: Validation 01:13 - Simple Model: Test 01:51 - Simple Model: Extra 03:14 - Backbone ... Papers and source code are available at Visual imitation learning provides efficient and ... This work developed a Chinese character recombination technology based on DMP This video is a demonstration conducted in part of a thesis by Ly, Phuc Thanh for Mechatronics Engineering - Bachelor of ... MIT computer scientists Leslie Kaelbling and Tomás Lozano-Pérez Motion primitives are a highly useful and widely employed tool in the field of Learning from Demonstration (LfD). However ...
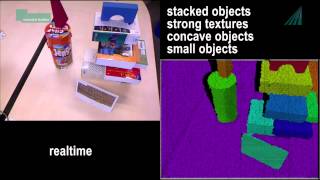
This is an example of applied deep learning, specifically semantic We present a real-time algorithm that segments unstructured and highly cluttered scenes. The algorithm robustly separates ...