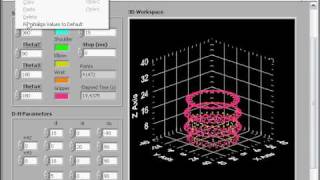
Media Summary: Jose Avendano and Sebastian Castro walk you through the source code: github.com/mqnc/wovi2 background music: Subject: Mechanical Engineering and Science Course:
Robot Manipulator Workspaces Lecture 7a - Detailed Analysis & Overview
Jose Avendano and Sebastian Castro walk you through the source code: github.com/mqnc/wovi2 background music: Subject: Mechanical Engineering and Science Course: TIAGo has a wide range of mobility thanks to its 12 Degrees of Freedom (without end-effector). Its Will I do its thing to open we'll try again cuz sometimes it does that alright so this won't the