Media Summary: Welcome! This is the 6th and final video of the " Kwon, Jaewoon, Seunghyun Kim, and Frank C. Park. "Physically Consistent Lie Group Mesh Models for Marc Toussaint, Jung-Su Ha, and Ozgur S. Oguz Learning & Intelligent Systems Lab, TU Berlin IEEE Int. Conf. on
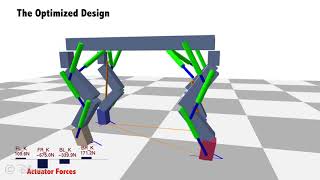
Robot Input Design Part Optimization - Detailed Analysis & Overview
Welcome! This is the 6th and final video of the " Kwon, Jaewoon, Seunghyun Kim, and Frank C. Park. "Physically Consistent Lie Group Mesh Models for Marc Toussaint, Jung-Su Ha, and Ozgur S. Oguz Learning & Intelligent Systems Lab, TU Berlin IEEE Int. Conf. on This talk was given by undergraduate Cenk Baykal during the 8th Annual Computer Science Undergraduate Research ... Discover the crucial connection between mechanical We present a novel computational approach to
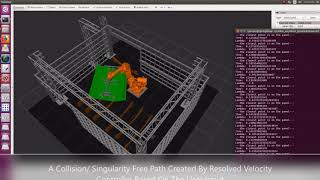
Presented by Scott Kuindersma, Harvard John A. Paulson School of Engineering and Applied Sciences Talk Description: Despite ... This video provides some intuition around Pose Graph Production plants are re-designed to implement human-centered solutions in which ICRA 2018 Spotlight Video Interactive Session Tue AM Pod Q.1 Authors: Kuntz, Alan; Bowen, Chris; Baykal, Cenk; Mahoney, Art; ...