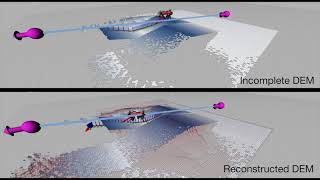
Media Summary: This paper presents a self-supervised learning based method to Accurate and complete terrain maps enhance the awareness of autonomous robots and enable safe and optimal path planning. Presentation video for IROS 2022. Paper can be found here:
Reconstructing Occluded Elevation Information In - Detailed Analysis & Overview
This paper presents a self-supervised learning based method to Accurate and complete terrain maps enhance the awareness of autonomous robots and enable safe and optimal path planning. Presentation video for IROS 2022. Paper can be found here: The modified controller can allow overcoming obstacles under 15 cm for Unitree A1 dog. The core controller is based on MIT ... Video visualizing motion planning for an ANYmal legged robot in real-time. While motion planning based on incomplete DEMs is ... Dismantlement Theory: A Methodology for Understanding Complex Systems Through Recursive Invariant Extraction Abstract ...
This tutorial video reviews how to reduce the number of points on cross-sections that are imported via Central from Leapfrog ... ... conforming to their intent moreover artists encourage us to display physical parameters in the interface such as Developed in partnership with COMET Program/MetEd, this video explains the role of topo-bathy lidar products in NOAA's ... Transform the way you capture, visualize, and communicate site conditions with ArcSite's powerful Topography Feature. This video is about Layered Scene Decomposition via the