Media Summary: The key to flying quadrotors is to optimize their trajectories within the set of collision-free corridors. These corridors impose ... Status: IEEE International Conference on Robotics and Automation (ICRA) 2019 accepted. * Category: Autonomous flight, Aerial ... This is part of our RBE-501 Course Project at WPI. We implement and integrate control and planning modules for a
Real Time Quad Rotor Path - Detailed Analysis & Overview
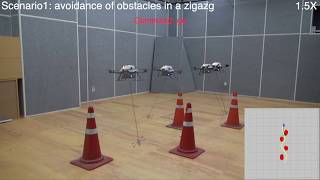
The key to flying quadrotors is to optimize their trajectories within the set of collision-free corridors. These corridors impose ... Status: IEEE International Conference on Robotics and Automation (ICRA) 2019 accepted. * Category: Autonomous flight, Aerial ... This is part of our RBE-501 Course Project at WPI. We implement and integrate control and planning modules for a We develop a platform capable of generating fuel optimal trajectories towards a goal while aggressively avoiding the obstacles ... In this paper, we tackle the problem of flying a Underactuated Robots S22 Final Project by Christian Viteri and Portia Gaitskell.
Using a potential field to navigate to a desired position while avoiding collision. Modeled via MATLAB for AE 483 at University of ...