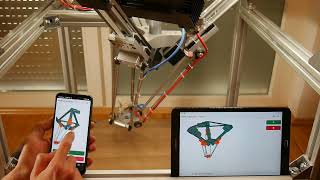
Media Summary: Linux kernel v6.1, ARM64 * PREEMPT_RT patch * Custom OS built with PTXdist Code on GitHub: ... The ctrlX AUTOMATION platform now supports CNC program generation is done in Python asyncio. The execution is commanded to
Real Time Codesys Softmotion With - Detailed Analysis & Overview
Linux kernel v6.1, ARM64 * PREEMPT_RT patch * Custom OS built with PTXdist Code on GitHub: ... The ctrlX AUTOMATION platform now supports CNC program generation is done in Python asyncio. The execution is commanded to Share If you Like! offers a wide range of communication protocols, enabling robust communication capabilities across ... I let a delta robot keep a marble run alive - picking steel balls with a magnetic gripper and dropping them back onto the ...