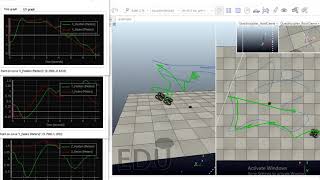
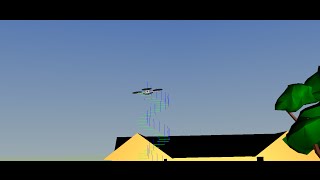
Media Summary: The goal of this video is to implement a P controller to control the motion and track the the 3D visualization of the performance of three controllers. The main contribution of this work is the robust transportation of a cable-suspended payload by a
Quadrotor Trajectory Tracking Using Pd - Detailed Analysis & Overview
The goal of this video is to implement a P controller to control the motion and track the the 3D visualization of the performance of three controllers. The main contribution of this work is the robust transportation of a cable-suspended payload by a Quadrotor: Trajectory Tracking (IDA-PBC flight controller) Quadcopter trajectory tracking with suspended payload using feedback linearization and PD control