Media Summary: PX4 path tracking algorithm animation using ROS and Gazebo PX4 SITL - Path Planning with Object Detection and Geo-Localization See the other videos in this series: This video ...
Px4 Path Tracking Algorithm Animation - Detailed Analysis & Overview
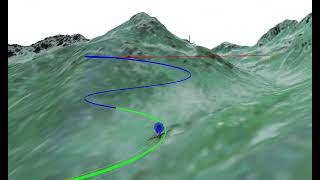
PX4 path tracking algorithm animation using ROS and Gazebo PX4 SITL - Path Planning with Object Detection and Geo-Localization See the other videos in this series: This video ... Unmanned aerial vehicles (UAVs) are impacting many industries including transportation, delivery, agriculture, and surveillance. custom implementation of RRT star in 3D space for uav. Started from different positions 0:00 PID controller 2:15 Geometric
This video demonstrates a vision-based autonomous UAV docking framework in a