Media Summary: Professor Nick Hawes, of the Oxford Robotics Institute, delivers a taster lecture at an Engineering Science Open Day. Open Days ... Wolfram Burgard presenting his talk titled " A conference talk from ICAPS 2009, given by Michael Kneebone.
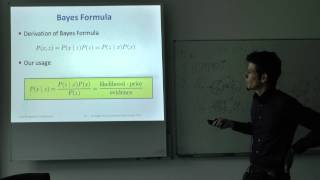
Probabilistic Navigation Function - Detailed Analysis & Overview
Professor Nick Hawes, of the Oxford Robotics Institute, delivers a taster lecture at an Engineering Science Open Day. Open Days ... Wolfram Burgard presenting his talk titled " A conference talk from ICAPS 2009, given by Michael Kneebone. RWTH Artificial Intelligence Colloquium series, talk 3 Speaker: Prof. Wolfram Burgard (Universität Freiburg) Title: We issue the problem of cooperative control of a swarm of autonomous mobile robots that are required to intercept a set of moving ... Topics on: Machine Learning ML/ UnSupervised Learning/ intro to the mechanism of Self-Organizing map SOM/