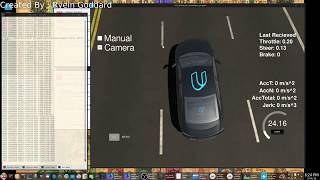
Media Summary: The video displays the modified RM3 robot with the drill attachment used for the navigation simulation. The This video introduces roadmap methods for complete Unaltered video by Open Robotics from under the Attribution-NonCommercial-NoDerivs 3.0 Unported ...
Predefined Path Planner - Detailed Analysis & Overview
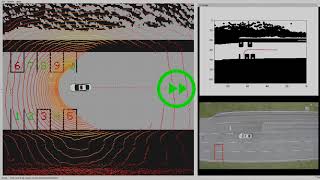
The video displays the modified RM3 robot with the drill attachment used for the navigation simulation. The This video introduces roadmap methods for complete Unaltered video by Open Robotics from under the Attribution-NonCommercial-NoDerivs 3.0 Unported ... Detection of the traffic light is done using a deep neural network along with mpc. Description: This video demonstrates a probabilistic Using the ROS move_base package ( which includes a global
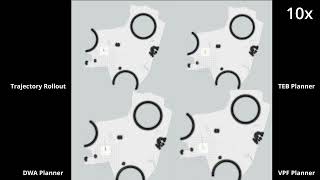
The human operator can modify in real time the Side by side comparision of the 4 ROS local This video shows how to generate the shortest length Relief is a Egyptian-based solo project by Mohamed Kadri. Relief combines ethereal electronics with lush guitars and synths to ...









![Relief - Optimal Trajectory Planner (Full Album) [SpaceAmbient]](https://i.ytimg.com/vi/JHaN16lC8Xs/mqdefault.jpg)