Media Summary: PR2 Interprets Spatial Language Instructions with Constraints This video shows a demonstration held the 5th of September 2012 at the Robotics Lab, UC Berkeley. The robot learns nouns, ... PR2 Object Fetching and Spatial Movement Tasks from Discourse
Pr2 Interprets Spatial Language Instructions - Detailed Analysis & Overview
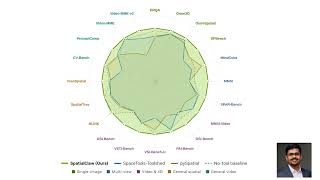
PR2 Interprets Spatial Language Instructions with Constraints This video shows a demonstration held the 5th of September 2012 at the Robotics Lab, UC Berkeley. The robot learns nouns, ... PR2 Object Fetching and Spatial Movement Tasks from Discourse What if AI could think through space by writing Python code instead of just calling tools? Meet SpatialClaw — a groundbreaking ... The challenge of map understanding in AI systems This video was generated using NotebookLM and is based on publicly available research material. I'd love to hear your feedback ...
Maxwell Forbes, Rajesh P. Rao, Luke Zettlemoyer and Maya Cakmak.



![[RO-MAN'21] (Presentation) Spatial Language Understanding for Object Search](https://i.ytimg.com/vi/TNwi1kS715Q/mqdefault.jpg)