Media Summary: Paper: Baichuan Huang, Jingjin Yu, Siddarth Jain Abstract: In this paper, we explore the dynamic ... This is a simple gesture recognition program for the MeArm. It uses the MediaPipe to detect In this demonstration, we present real-time
Pose Estimation Hand Controlled Robotic - Detailed Analysis & Overview
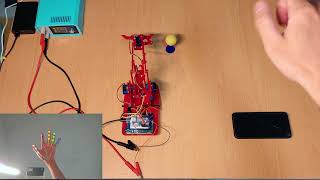
Paper: Baichuan Huang, Jingjin Yu, Siddarth Jain Abstract: In this paper, we explore the dynamic ... This is a simple gesture recognition program for the MeArm. It uses the MediaPipe to detect In this demonstration, we present real-time In this video, I demonstrate a full real-time human-to- The process for this docking procedure is very slow because of the limited computing power we had. Watch on 2x speed. This is ... Macroact's R&D lab focuses to enhance the interaction between
For the first time, an algorithm trained only on synthetic data is able to beat a state-of-the-art network trained on real images for ... Presented at the 3rd International Conference on Electrical Engineering 2021. X. Wang et al., "Learning-Based Visual-Strain Fusion for Eye-in- Keypoint detection is an essential building block for many