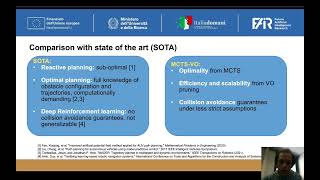
Media Summary: This video summarizes joint work between MELCO researchers Kei Ota, Tadashi Onishi and Toshishada Mariyama, MERL ... By Deepak Subramani Date : April 12, 2019 URL : Title: Monte Carlo Tree Search with Velocity Obstacles for safe and efficient motion
Planning In Dynamic Environments - Detailed Analysis & Overview
This video summarizes joint work between MELCO researchers Kei Ota, Tadashi Onishi and Toshishada Mariyama, MERL ... By Deepak Subramani Date : April 12, 2019 URL : Title: Monte Carlo Tree Search with Velocity Obstacles for safe and efficient motion In this informative and engaging video, we dive deep into the art of project Code: Paper: Abstract: This paper presents PANTHER, ... We address the issue of mobile robot navigation in
Strategic Planning in Dynamic Environments Strategic Planning for Dynamic Environments SwRI's Levi Armstrong demonstrates a real-time path