Media Summary: PIXHAWK: Vision-Based Autonomous Mapping and Exploration Using a Quadrotor MAV Vision-based PX4 Quadcopter Autonomous Wall Inspection Vision-Based Autonomous Mapping and Exploration Using a Quadrotor MAV
Pixhawk Vision Based Autonomous Mapping - Detailed Analysis & Overview
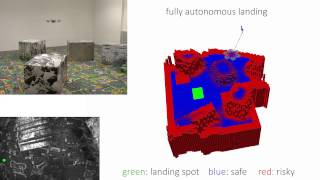
PIXHAWK: Vision-Based Autonomous Mapping and Exploration Using a Quadrotor MAV Vision-based PX4 Quadcopter Autonomous Wall Inspection Vision-Based Autonomous Mapping and Exploration Using a Quadrotor MAV In the video, the vehicle descends until it detects an obstacle in the landing area. It then flies a squared spiral pattern to find a ... In this paper, we propose a resource-efficient system for real-time 3D terrain reconstruction and landingspot detection for micro ...