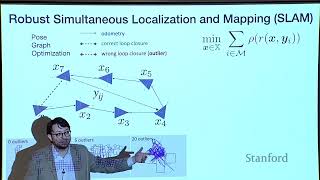
Media Summary: Pitch video created for the WPI course RBE549 Computer Vision - Project 3 "Einstein Vision" December 8, 2023 Luca Carlone, MIT A large gap still separates robot and human This short clip shows our prototype for the visual
Perception Pipeline - Detailed Analysis & Overview
Pitch video created for the WPI course RBE549 Computer Vision - Project 3 "Einstein Vision" December 8, 2023 Luca Carlone, MIT A large gap still separates robot and human This short clip shows our prototype for the visual Vision language models like Gemma 4 are great at understanding images but terrible at counting objects. In this video, I combine ... Quick navigation: 0:50 - Description 1:57 - Start 2:40 - Closer Explanation 3:00 - Setup AIMEnvironment 3:57 - Setup ...









![Perception Pipeline | Polarith AI Unity Tutorial [Basics]](https://i.ytimg.com/vi/vSfYcOoKb7U/mqdefault.jpg)