Media Summary: ICRA 2018 Spotlight Video Interactive Session Thu PM Pod D.8 Authors: Tosun, Tarik; Daudelin, Jonathan; Jing, Gangyuan; ... Paper available on arXiv: We present a system enabling a modular robot to autonomously build ... Christoffer Heckman CU Boulder January 17, 2020
Perception Informed Autonomous Environment Augmentation - Detailed Analysis & Overview
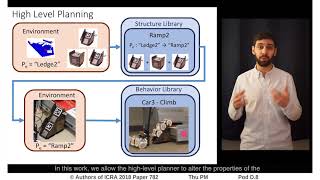
ICRA 2018 Spotlight Video Interactive Session Thu PM Pod D.8 Authors: Tosun, Tarik; Daudelin, Jonathan; Jing, Gangyuan; ... Paper available on arXiv: We present a system enabling a modular robot to autonomously build ... Christoffer Heckman CU Boulder January 17, 2020 At IBM Research – Ireland our team have built a 3D Computer Vision driven task completion prototype called the “Puzzle Solving ... Bay Area Vision Meeting (more info below) CVPR Spotlight Oral Video. URL: Github: Dataset: ...
Master thesis by UNIZG-FER student Dorian Dinčir mentored in LAMOR. We present the UT Campus Object Dataset (CODa) - the largest multiclass, multimodal urban robotics dataset to date, with 1.3 ... Noah Jang, SVP of Global Business at Vueron discusses LiDAR Recently, neural control policies have outperformed existing model-based planning-and-control methods for autonomously ...