Media Summary: For more information please visit www.willowgarage.com. Rosie Li from the University of Washington in St. Louis talks about her contributions to This video shows the first version of the
Pcl Surface Detector - Detailed Analysis & Overview
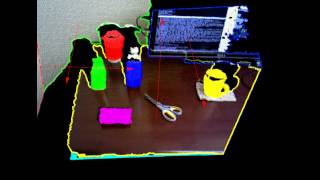
For more information please visit www.willowgarage.com. Rosie Li from the University of Washington in St. Louis talks about her contributions to This video shows the first version of the Testing the plane-fitting algorithm at Wean Hall, Carnegie Mellon University. The point cloud is obtained using the disparity map of ... RealSense Point-cloud Plane segmentation (PCL) 4 datasets: the lab (0:00), the standard (0:43), chairs (1:58), and the sofa (3:23). Green boxes are segmented person clusters; red ...