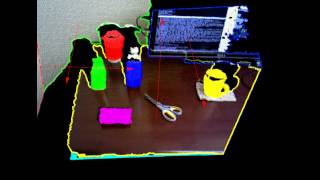
Media Summary: Second try on the set of parameters for the points projected in table plane with ground truth transformation between frames. RealSense Point-cloud Plane segmentation (PCL)
Pcl Multiplane Segmentation 01 - Detailed Analysis & Overview
Second try on the set of parameters for the points projected in table plane with ground truth transformation between frames. RealSense Point-cloud Plane segmentation (PCL) The objective of this project is to lay the foundations for object recognition and subsequent handling of these by the robot Manfred, ... This video shows a program developed to implement plane




![[Point Cloud Processing] Plane Segmentation using PCL](https://i.ytimg.com/vi/6FuMTkqUERk/mqdefault.jpg)




![[Point Cloud Processing] Plane Segmentation using PCL (RoK-3 WalkingReady)](https://i.ytimg.com/vi/aPVCSIewY7g/mqdefault.jpg)

![[Point Cloud Processing] Plane Segmentation using PCL (RoK-3 standing)](https://i.ytimg.com/vi/FmqB5FgAaz4/mqdefault.jpg)