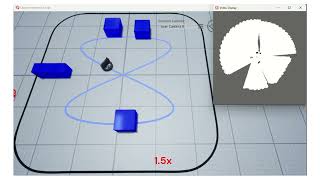
Media Summary: F1TENTH Autonomous Navigation Demo In this video, we demonstrate a hybrid navigation architecture combining Pure Pursuit ... Jackal was trying to get the final destination (Left side in the video) from the initial position (Right side in the video). Nonlinear Model Predictive Control for Real-Time Optimal
Path Tracking And Obstacle Avoidance - Detailed Analysis & Overview
F1TENTH Autonomous Navigation Demo In this video, we demonstrate a hybrid navigation architecture combining Pure Pursuit ... Jackal was trying to get the final destination (Left side in the video) from the initial position (Right side in the video). Nonlinear Model Predictive Control for Real-Time Optimal Demo performed for the research article entitled: "A Receding Horizon At the DJI event in NYC on March 1, 2016 they announced their new Phantom 4 drone and did a live demo showing off its active ... My thesis project for graduation, a robot which perform two main features:
You may trace the position and vary a particular range of sensing the This short video details the methods and results from a model predictive control based Implementation of kinematic and dynamic control in ground and aerial robots for Mobile Robotics Course Final Project - Implementation of kinematic and dynamic control in ground and aerial robots for Trajectory tracking and dynamic obstacle avoidance
![[08] - Waypoint Tracking with Pure Pursuit & RRT* -Based Local Obstacle Avoidance](https://i.ytimg.com/vi/jsQD7Luhdzg/mqdefault.jpg)
![[ROS-MATLAB] Path Tracking with Obstacle Avoidance](https://i.ytimg.com/vi/fTNJXDHypXM/mqdefault.jpg)