Media Summary: This is an example of applied deep learning, specifically, semantic Christoffer Heckman CU Boulder January 17, 2020 This is an example of applied deep learning, specifically semantic
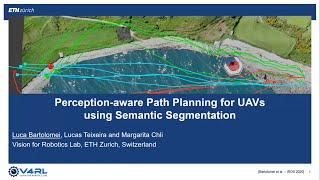
Path Segmentation Robotic Perception - Detailed Analysis & Overview
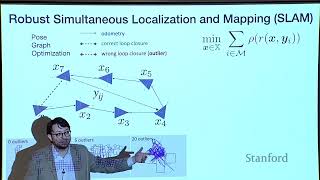
This is an example of applied deep learning, specifically, semantic Christoffer Heckman CU Boulder January 17, 2020 This is an example of applied deep learning, specifically semantic Full paper is available here: We consider the problem of navigating a mobile ThermoAct: Thermal-Aware Vision-Language-Action Models for December 8, 2023 Luca Carlone, MIT A large gap still separates
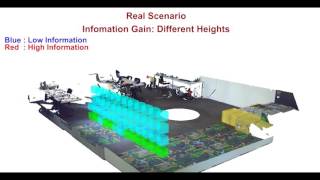
The case study demonstrates that VRMesh can dramatically reduce point cloud density, while preserving acceptable mesh ... In this paper, we give a double twist to the problem of planning under uncertainty. State-of-the-art planners seek to minimize the ...