Media Summary: See the other videos in this series: This video ... Ever wondered how intelligent machines perceive their surroundings and chart their course? This video dives deep into the ... Need to get to your goal quickly? Ensure you plan the right
Path Planning Using Vision - Detailed Analysis & Overview
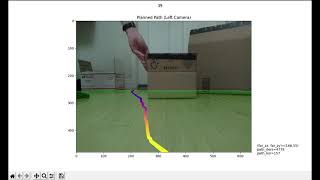
See the other videos in this series: This video ... Ever wondered how intelligent machines perceive their surroundings and chart their course? This video dives deep into the ... Need to get to your goal quickly? Ensure you plan the right In this video, Our summer Intern, Indira Dwivedi presents the idea of simple line of We present our work on integrating a locomotion controller based on central pattern generator (CPG) and a motion However, current systems often separate map exploration and
Stereo Camera Autonomous Navigation: Obstacle Avoidance & Path-Planning This work was carried out by Bradley Kohler, Ya-Jun Pan and Robert Bauer at the Advanced Control and Mechatronics Lab, ...