Media Summary: Deterministic route finding isn't enough for the real world - Nick Hawes of the Oxford Robotics Institute takes us In this video, you'll get a comprehensive introduction to For more information about Stanford's Artificial Intelligence professional and graduate programs, visit:
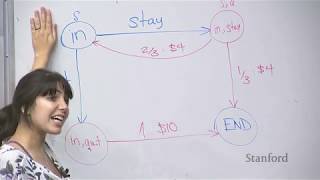
Path Planning Using Markov Decision - Detailed Analysis & Overview
Deterministic route finding isn't enough for the real world - Nick Hawes of the Oxford Robotics Institute takes us In this video, you'll get a comprehensive introduction to For more information about Stanford's Artificial Intelligence professional and graduate programs, visit: Csaba Szepesvari (University of Alberta, Google DeepMind) & Mengdi Wang (Princeton University, Google DeepMind) ... All right so for the next set of slides what I'm going to do is introduce a some theory regarding semi COMPSCI 188, LEC 001 - Fall 2018 COMPSCI 188, LEC 001 - Pieter Abbeel, Daniel Klein Copyright UC Regents; ...
In this scenario, an "infiltrator" quadcopter uses a Can end-to-end learning substitute the classical perception,