Media Summary: Need to get to your goal quickly? Ensure you plan the right See the other videos in this series: This video ... Embedded System Class Project. Implement A*
Path Planning Mobile Robot - Detailed Analysis & Overview
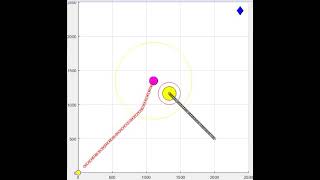
Need to get to your goal quickly? Ensure you plan the right See the other videos in this series: This video ... Embedded System Class Project. Implement A* Discover how to create occupancy grids from different sources after collecting environment information using various Research on Dynamic Path Planning of Mobile Robot Localization and Mapping, odometry based localization, dead reckoning based localization, map based localization, Kalman filter ...
Sebastian Castro discusses technical concepts, practical tips, and software examples for motion