Media Summary: NDSU ECE 761: Introduction to Robotics lecture . Please visit Bison Academy for corresponding lecture notes, homework sets, ... See the other videos in this series: This video ... Need to get to your goal quickly? Ensure you plan the right
Path Planning For Cable Driven - Detailed Analysis & Overview
NDSU ECE 761: Introduction to Robotics lecture . Please visit Bison Academy for corresponding lecture notes, homework sets, ... See the other videos in this series: This video ... Need to get to your goal quickly? Ensure you plan the right ... wandering around the environment to kind of see what we can see in true Collision-Free Path Planning of Cable-Driven Parallel Robots in Cluttered Environments This video shows in green the atlas generated to find a wrench-feasible
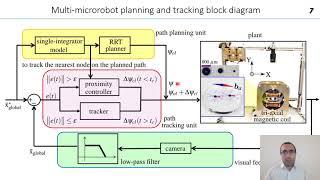
Presentation from ICRA2021 of the paper: M. Salehizadeh and E. Diller, “