Media Summary: Robot travels to goal pose using bresenham's line algorithm and eliminates much computational work unlike the standard ... In this video we show how our current access to our technology could look like. We use it here to plan a collision-free This is a robot that my lab partner and I built from scratch using the Arduino Uno. The purpose of this Robot is to combine the ...
Path Planner With 2 Points - Detailed Analysis & Overview
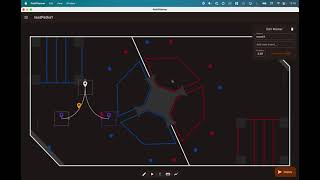
Robot travels to goal pose using bresenham's line algorithm and eliminates much computational work unlike the standard ... In this video we show how our current access to our technology could look like. We use it here to plan a collision-free This is a robot that my lab partner and I built from scratch using the Arduino Uno. The purpose of this Robot is to combine the ... In this class, we discuss configuration space, visibility graphs, and A* algorithms that are basic components of motion See the other videos in this series: This video ... demonstration of how to leverage the new event markers, stop
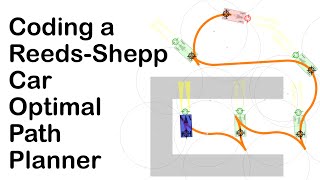
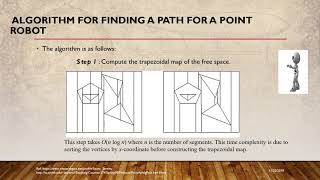
This video shows how to generate the shortest length A new add-on to our collision detector KCD allows to work on native high density Sorry for the choppy framerate in a lot of the clips in this video. This patch hasn't been great for my PC's performance. I've fixed a ... Myself Shridhar Mankar a Engineer l YouTuber l Educational Blogger l Educator l Podcaster. My Aim- To Make Engineering ... Sebastian Castro discusses technical concepts, practical tips, and software examples for motion Hello everyone, I'm the mentor of the Fusion Robotics 7682. This video shows the