Media Summary: Watch the first video in this series here: This video presents a high-level understanding of the ... This video is part of the Udacity course "Introduction to Computer Vision". Watch the full course at ... Speaker : Ashutosh Balakrishnan (IMT) Abstract : The lecture will provide a comprehensive summary of statistical inference using ...
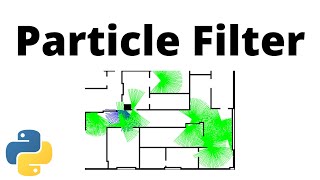
Particle Filter Pose Tracking Testing - Detailed Analysis & Overview
Watch the first video in this series here: This video presents a high-level understanding of the ... This video is part of the Udacity course "Introduction to Computer Vision". Watch the full course at ... Speaker : Ashutosh Balakrishnan (IMT) Abstract : The lecture will provide a comprehensive summary of statistical inference using ... green box: ground truth (manually labeled) blue box: algorithms estimate yellow dot: low rated Inside my school and program, I teach you my system to become an AI engineer or freelancer. Life-time access, personal help by ... This is the first video in a series of videos about robot localization. In other words, finding the location of a robot in a map.
Particle Filter for Pose Estimation using LiDAR and Odometry data