Media Summary: The video shows running the navigation2 Turtlebot3 demo, using an Developing ROS2 systems with Papyrus for Robotics -- Matteo Morelli, CEA-List The video shows how to obtain a component-definition model from a running ROS2 application via reverse engineering ...
Papyrus For Robotics Amcl Code - Detailed Analysis & Overview
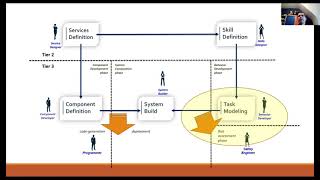
The video shows running the navigation2 Turtlebot3 demo, using an Developing ROS2 systems with Papyrus for Robotics -- Matteo Morelli, CEA-List The video shows how to obtain a component-definition model from a running ROS2 application via reverse engineering ... This video shows how ROS2 build files (CMakeLists.txt and package.xml) are automatically created from a component definition ... RobMoSys aims to build an ecosystem of modular Presentation of a joint paper at the RoSE 2021 workshop ( Jabier Martinez (1), ...
The video shows new features that improve the efficiency of a component developer writing the