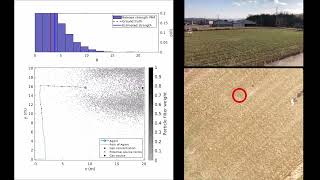
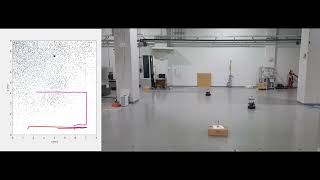
Media Summary: Outdoor source term estimation experiment using a drone for the acetone release scenario Indoor source term estimation experiment using multiple UGVs Ensemble-Based Inverse Model for Multiple Radionuclide
Outdoor Source Term Estimation Experiment - Detailed Analysis & Overview
Outdoor source term estimation experiment using a drone for the acetone release scenario Indoor source term estimation experiment using multiple UGVs Ensemble-Based Inverse Model for Multiple Radionuclide Natural Sciences and Engineering Research Council of Canada (NSERC)/Rio Tinto Industrial Research Chair (IRC) in Climate ... Full title: Tunable Impact and Vibration Absorbing Neck for Robust Visual-Inertial State