Media Summary: Example of mapping a room and saving the map. After capturing, the frames were processed ICRA 2018 Spotlight Video Interactive Session Tue AM Pod U.7 Authors: Mur-Artal, Raul; Tardos, Juan D. Title: Code & Info: Authors: Raúl Mur-Artal, J. M . M. Montiel and Juan D. Tardós University of ...
Orb Slam 2 Rgbd Using - Detailed Analysis & Overview
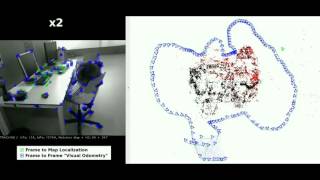
Example of mapping a room and saving the map. After capturing, the frames were processed ICRA 2018 Spotlight Video Interactive Session Tue AM Pod U.7 Authors: Mur-Artal, Raul; Tardos, Juan D. Title: Code & Info: Authors: Raúl Mur-Artal, J. M . M. Montiel and Juan D. Tardós University of ... E-mail : rodrigosarmentoxx.com GitHub: This project Paper ... Real-time 3D Reconstruction with ORB-SLAM2-RGBD Video showing robot recording its own trajectory during a simple forward and back movement. Monocular
ORB SLAM 2 with Calibrated Monocular Camera