Media Summary: Yanran Ding Assistant Professor UM Robotics Abstract: Legged robots possess a unique advantage in navigating unstructured ... MIT - February 21, 2025 Speaker: Zac Manchester Seminar title: Composable RobotoKAUST KAUST Research Conference on Robotics and Autonomy 2022 ...
Optimization Based Control And Planning - Detailed Analysis & Overview
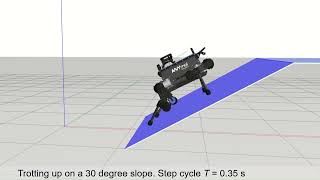
Yanran Ding Assistant Professor UM Robotics Abstract: Legged robots possess a unique advantage in navigating unstructured ... MIT - February 21, 2025 Speaker: Zac Manchester Seminar title: Composable RobotoKAUST KAUST Research Conference on Robotics and Autonomy 2022 ... Optimization-based Dynamic Motion Planning and Control for Quadruped Robots The fundamental promise of robotics centers on the ability to productively interact with a complex and changing world. Yet, current ... Instructor: Pieter Abbeel Course Website:
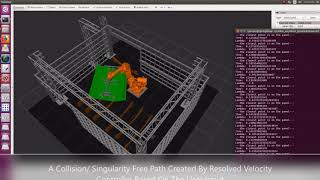
Video recording of lecture 6 of the summer course " This video introduces the variety of methods for model- This video is an introduction to trajectory Computations cool okay so um R You Know sample A path planner using operator inputs to generate a feasible path. The simulation is conducted using ROS Rviz.









![[Tutorial] Optimization, Optimal Control, Trajectory Optimization, and Splines](https://i.ytimg.com/vi/j82Ia436DYY/mqdefault.jpg)