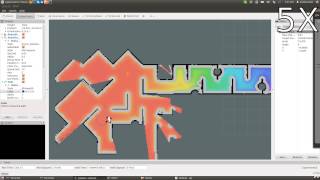
Media Summary: the gray cells are the free cells, and white cells describe obstacles. Each gray cell is divided into 4 sub-cells each of the same size ... In applications such as vacuuming, cleaning and demining, a robot must This video presents the simulation results of the paper titled "Distributed Global
Optimally Covering An Unknown Environment - Detailed Analysis & Overview
the gray cells are the free cells, and white cells describe obstacles. Each gray cell is divided into 4 sub-cells each of the same size ... In applications such as vacuuming, cleaning and demining, a robot must This video presents the simulation results of the paper titled "Distributed Global Presentation at 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) in Kyoto (Japan) about TAPE: ... Autonomous Exploration Method for Fast Unknown Environment Mapping Overview: Supplementary video submission of our paper "Online Exploration and
Demonstration of exploration of a simulated USAR (RoboCup Rescue) scenario using the Ackermann-steered Hector UGV robot ... Try it yourself: How Fountain built a background agent that proactively fixes issues before users ... This is the video accompanying the paper "Safe Local Exploration for Replanning in Cluttered Erin Trochim and Simon Ilyushchenko presented at the Geo-AI Working Group on March 4, 2026. They talked about Cooperative ... Provided to YouTube by Symphonic Distribution Adjusting To Your







![Monitoring the built environment for urban [...] | AI & Climate Change | Nicholas Jones](https://i.ytimg.com/vi/Vs0Z9yvjCeA/mqdefault.jpg)