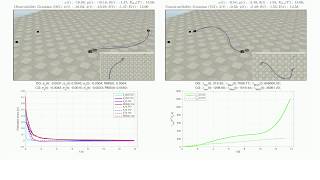
Media Summary: When user moves blue ball by mouse on screen, robot generates smooth and time optimal What do you do if you need a *really* smooth robot The attached video shows the simulation results of "
Online Trajectory Generation Experiment - Detailed Analysis & Overview
When user moves blue ball by mouse on screen, robot generates smooth and time optimal What do you do if you need a *really* smooth robot The attached video shows the simulation results of " This study presents an optimization-based This video is associated to the following paper : Kevin Desormeaux, Daniel Sidobre. Authors: Carl Hildebrandt, Sebastian Elbaum, Nicola Bezzo, and Matthew Dwyer This work was presented at The ACM SIGSOFT ...
Random length motions with jerk/acc/vel constraints are executed in 4ms cycle time. Ingredients: Ruckig OTG (Lars Berscheid, ... Published in Journal of Intelligent & Robotic Systems. Abstract - Dynamic Movement Primitives (DMP) have found remarkable ...