Media Summary: This video is part of the RoboJackets Software Training Program for Fall 2021. MOBILE ROBOTICS: METHODS & ALGORITHMS - WINTER 2022 University of Michigan - NA 568/EECS 568/ROB 530 For slides, ... This video explains how to use the CoppeliaSim plugin to create
Occupancy Grid Mapping With Bug2 - Detailed Analysis & Overview
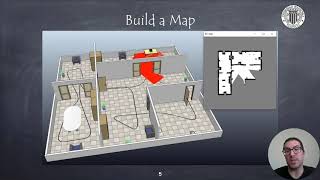
This video is part of the RoboJackets Software Training Program for Fall 2021. MOBILE ROBOTICS: METHODS & ALGORITHMS - WINTER 2022 University of Michigan - NA 568/EECS 568/ROB 530 For slides, ... This video explains how to use the CoppeliaSim plugin to create ENLACE interns Yoatzin and Ziyun implemented The Robot plots a path based on the bits of the world it knows about. As it learns more about the world it adjusts it path. Overall its ...