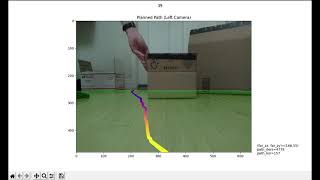
Media Summary: Stereo Camera Autonomous Navigation: Obstacle Avoidance & Path-Planning Red dot = detected object. Blue box = potential escape path. Green Box = best escape path ( by shortest distance) Ref: OpenCV. In this work, we study the effects that perception latency has on the maximum speed a robot can reach to safely navigate through ...
Obstacle Avoidance Prototype Using Sony - Detailed Analysis & Overview
Stereo Camera Autonomous Navigation: Obstacle Avoidance & Path-Planning Red dot = detected object. Blue box = potential escape path. Green Box = best escape path ( by shortest distance) Ref: OpenCV. In this work, we study the effects that perception latency has on the maximum speed a robot can reach to safely navigate through ...