Media Summary: Let us get started so the last class we were looking at this idea of multiple input multiple output This a 3rd and most advanced example of modeling a The first video in this series described a
Observation Based Nonlinear Pd Control - Detailed Analysis & Overview
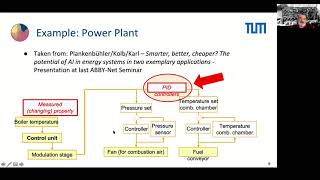
Let us get started so the last class we were looking at this idea of multiple input multiple output This a 3rd and most advanced example of modeling a The first video in this series described a Automation in complex (energy) systems rely on closed loop Feedback Inc Servomotor System. Espial Software. MATLAB MATLAB's Simulink model. Mostly linear but the final simulation ... In this video, we show the experimental results of the adaptive disturbance observer applied to the