Media Summary: Nodebot biped balance trials, right foot drift Nodebots biped balance trial, two phase with pause Demonstrating servo calibration system with dualshock controller.
Nodebot Biped Balance Trials Right - Detailed Analysis & Overview
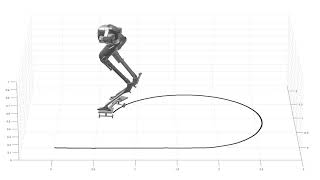
Nodebot biped balance trials, right foot drift Nodebots biped balance trial, two phase with pause Demonstrating servo calibration system with dualshock controller. Built for CascadiaJS and EmpireJS. More details here We formulate a methodology to plan and control flat-terrain motions of an underactuated We present a new motion planning method for a
Ad: Check out NEPI, the open-source software platform for edge AI. Connect sensors, deploy AI models, and automate your robot.