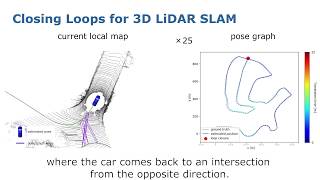
Media Summary: Incremental Scan-to-Submap registration and Talk for the RSS 2020 paper: X. Chen, T. Läbe, A. Milioto, T. Röhling, O. Vysotska, A. Haag, J. Behley, and C. Stachniss, ... Build 3D map in KITTI dataset(sequence 00) through graph-
Ndt Based Slam With Loop - Detailed Analysis & Overview
Incremental Scan-to-Submap registration and Talk for the RSS 2020 paper: X. Chen, T. Läbe, A. Milioto, T. Röhling, O. Vysotska, A. Haag, J. Behley, and C. Stachniss, ... Build 3D map in KITTI dataset(sequence 00) through graph- X. Chen, T. Läbe, A. Milioto, T. Röhling, O. Vysotska, A. Haag, J. Behley, and C. Stachniss, “OverlapNet: University of Michigan EECS 568 Final Project: Deep In this video, Sabyasachi, Research Associate at IISc Bangalore explains the basics of
This video provides some intuition around Pose Graph Optimization—a popular framework for solving the simultaneous ...
![Loopy-SLAM: Dense Neural SLAM with Loop Closures [CVPR 2024]](https://i.ytimg.com/vi/tQCKjno0Yrk/mqdefault.jpg)