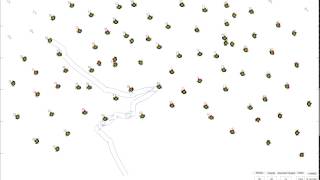
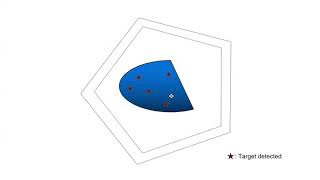
Media Summary: A network of mobile robots can track randomly Multiple target tracking using multiple UAVs We cover a few ways to solve these issues and provide a general way to approach all
Multiple Target Tracking By Distributed - Detailed Analysis & Overview
A network of mobile robots can track randomly Multiple target tracking using multiple UAVs We cover a few ways to solve these issues and provide a general way to approach all This paper introduces the normalized unused sensing capacity to measure the amount of information that a sensor is currently ...