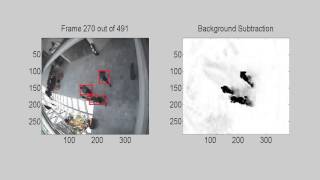
Media Summary: Multiple targets are being tracked using the Paper link: Abstract: We study the problem of assigning robots with actions to track targets. Authors: Hyeonchul Jung; Seokjun Kang; Takgen Kim; HyeongKi Kim Description: Kalman filter-based
Multi Target Tracking On Confidence - Detailed Analysis & Overview
Multiple targets are being tracked using the Paper link: Abstract: We study the problem of assigning robots with actions to track targets. Authors: Hyeonchul Jung; Seokjun Kang; Takgen Kim; HyeongKi Kim Description: Kalman filter-based Aerospace Systems and Control Lab (ASCL), KAIST