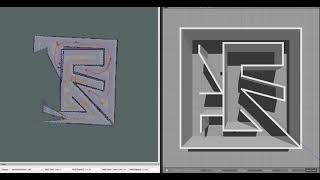
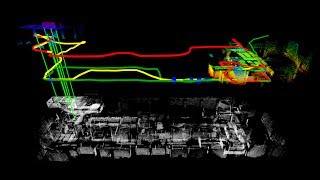
Media Summary: This is a video accompanying the paper decentralized active information acquisition Theory and application to UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file". Abstract: we present an innovative approach to collaborative Simultaneous Localization and Mapping (
Multi Robot Slam Simulated Environment - Detailed Analysis & Overview
This is a video accompanying the paper decentralized active information acquisition Theory and application to UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file". Abstract: we present an innovative approach to collaborative Simultaneous Localization and Mapping ( An application of multi-robot slam in indoor environments Accompanying video for our IROS17 publication titled "An Online Demonstration of Simultaneous Localization and Mapping (