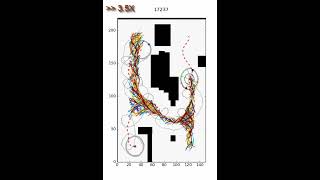
Media Summary: Multi-Robot Coordination Demo VDA 5050 Standard We present a novel approach to compute collision-free paths for Teng Guo, Si Wei Feng and Jingjin Yu For enabling efficient, large-scale
Multi Robot Coordination 3d - Detailed Analysis & Overview
Multi-Robot Coordination Demo VDA 5050 Standard We present a novel approach to compute collision-free paths for Teng Guo, Si Wei Feng and Jingjin Yu For enabling efficient, large-scale In a recent T-RO paper, researchers from Université Paris-Saclay and Université de Picardie Jules Verne propose a novel method ...


![[WIM Robotics] Multi-Robot Collision Avoidance with 3D Vision for Real-time Pick-and-Place](https://i.ytimg.com/vi/NnGIlz7EEPw/mqdefault.jpg)