Media Summary: Step into the future of factory automation with MagicBot, the cutting-edge humanoid Synchronization and repeatability are essential for industrial Lei Yan, Theodorous Stouraitis and Sethu Vijayakumar, Decentralized Ability-Aware Adaptive Control for
Multi Robot Collaboration And Distributed - Detailed Analysis & Overview
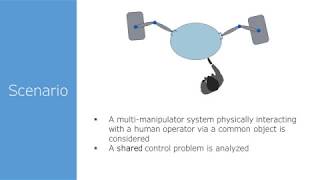
Step into the future of factory automation with MagicBot, the cutting-edge humanoid Synchronization and repeatability are essential for industrial Lei Yan, Theodorous Stouraitis and Sethu Vijayakumar, Decentralized Ability-Aware Adaptive Control for Lei Yan, Theodoros Stouraitis and Sethu Vijayakumar, Decentralized Ability-Aware Adaptive Control for More information at Music: Hip Jazz from Bensound.com. The objective is to devise a general framework to allow a human operator to physically interact with an object manipulated by a ...
Filippo Arrichiello, Jnaneshwar Das, Hordur K. Heidarsson, Arvind A. de Menezes Pereira, Stefano Chiaverini and Gaurav S. Authors: Aalok Patwardhan, Riku Murai, Andrew J. Davison Dyson